主動車距巡航 (ACC) 系統操作限制
主動車距巡航 (ACC) 系統的攝影鏡頭 / 雷達的可偵測範圍有限,因此有無法偵測 / 延遲偵測 / 無法正常作用的狀況。駕駛應保持警覺,必要時主動介入。
系統不會進行介入之情況
- 號誌為紅燈。
- 有靜止的車輛或物體。
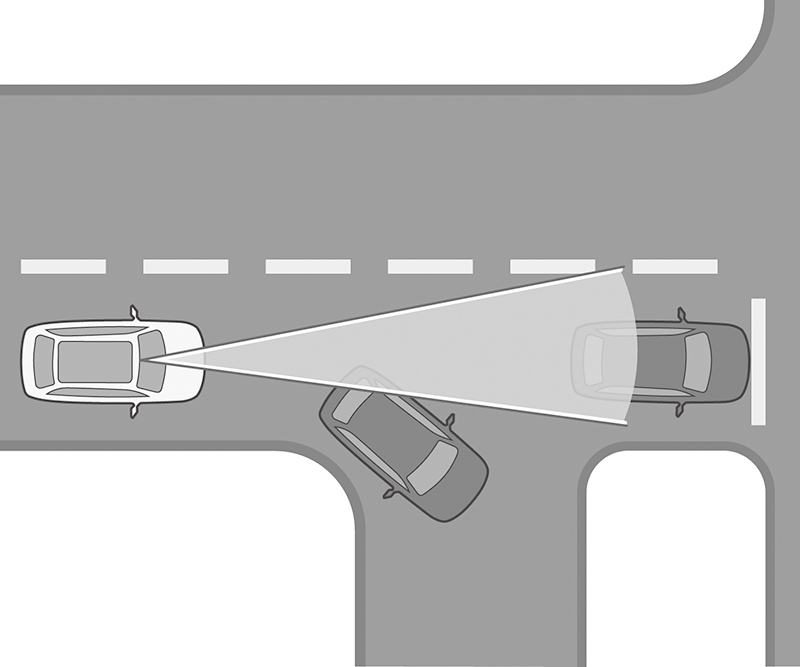
- 橫向行駛的車輛。
- 當前方車速符合或超過車速時。
- 當前方以慢速的車速行駛時。
- 巡航控制速度剛設定完畢時。
- 踩下電門時。
- 雷達 / 攝影鏡頭受到遮擋或故障時。
- 上述項目並未完全列出干擾本系統正常運作的所有情況。
注意
除上述情況外,ACC 系統可能會因為物體移動速度緩慢的情況而導致介入控制時間較慢。駕駛須隨時注意周遭情況並即時進行操控以免發生危險。
系統可能延遲介入之情況
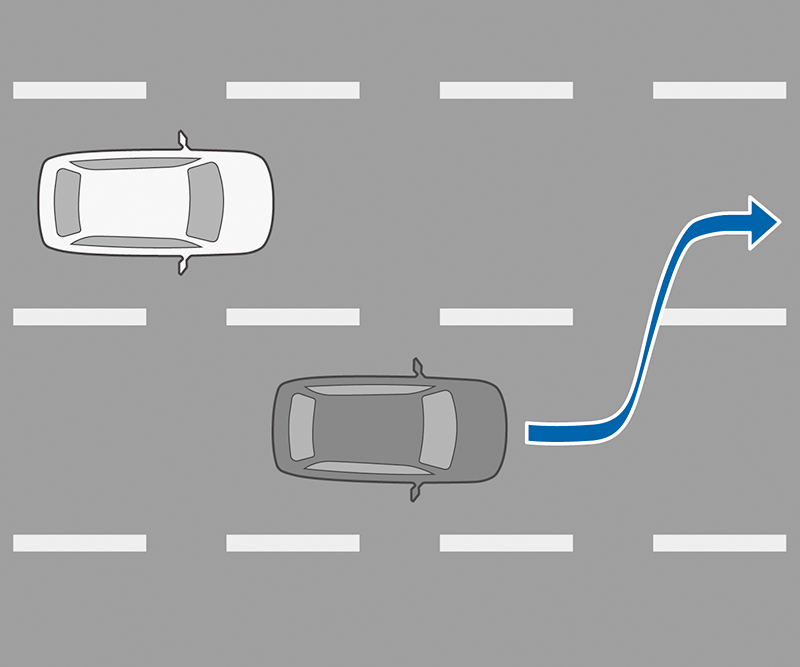
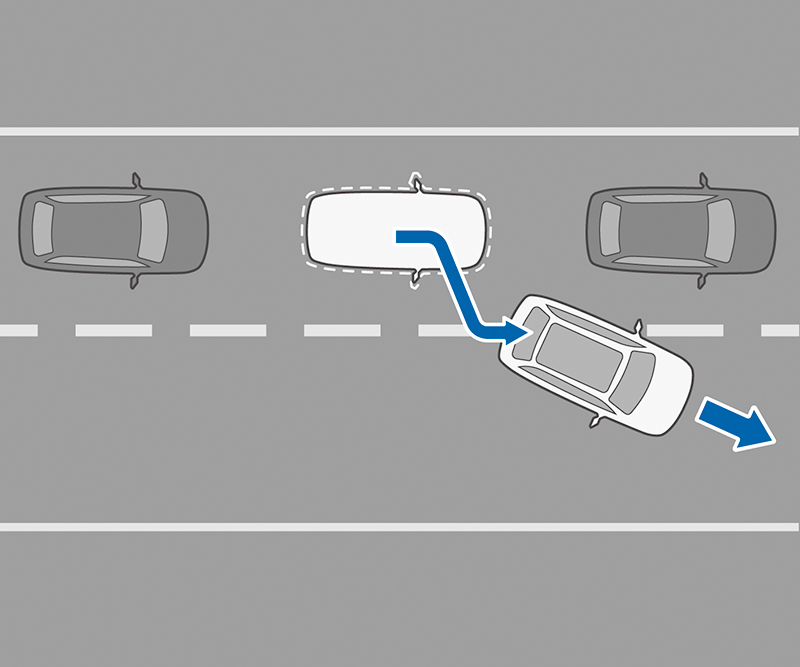
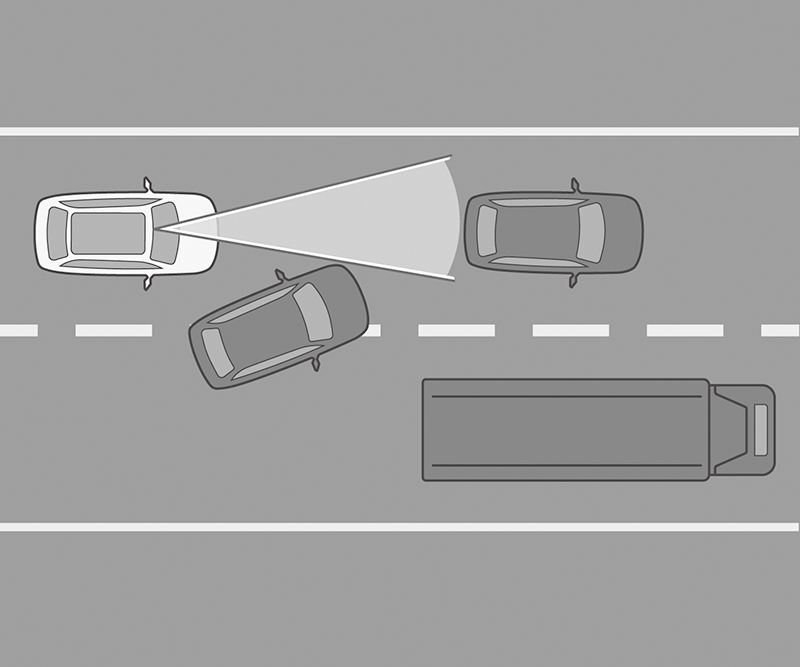
駛入本車道的車輛
當相鄰車道上的車輛完全行駛至本車道上時,才能夠被系統辨識並介入。
注意
如果本車道的前方車輛突然駛入,系統可能無法立即自動調整到選定的車距。駕駛應依照實際狀況自行操作煞車減速,以避免因車速過快而導致與前車發生碰撞的情況發生。
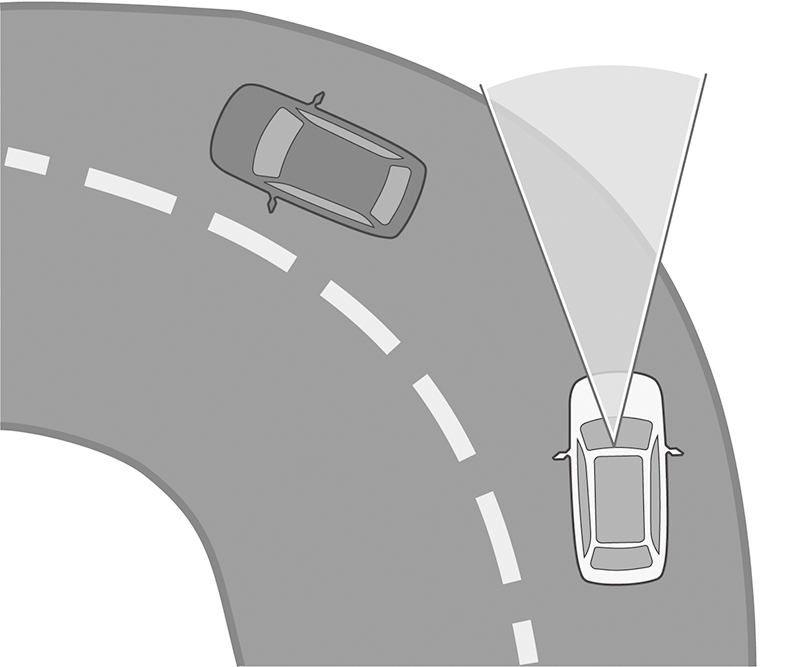
彎道行駛
在彎道上由於系統的識別範圍受到限制,可能會導致無法偵測到前面行駛的車輛或者偵測延遲。
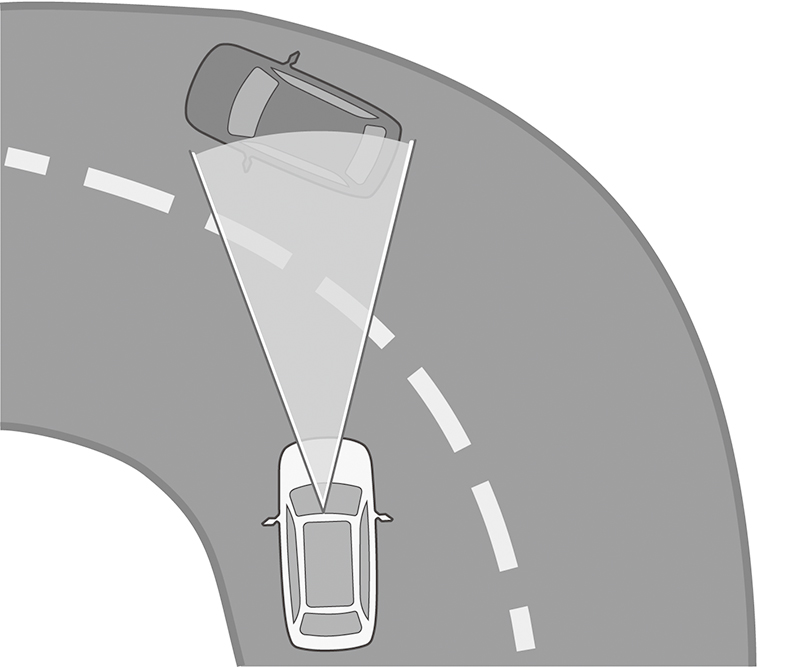
在接近轉彎處時,系統可能會對同向但相鄰車道上的前車作出反應。如果系統將車輛減速,可以稍稍踩踏電門來提高車速,待鬆開電門後系統會重新介入並自動調節車速。
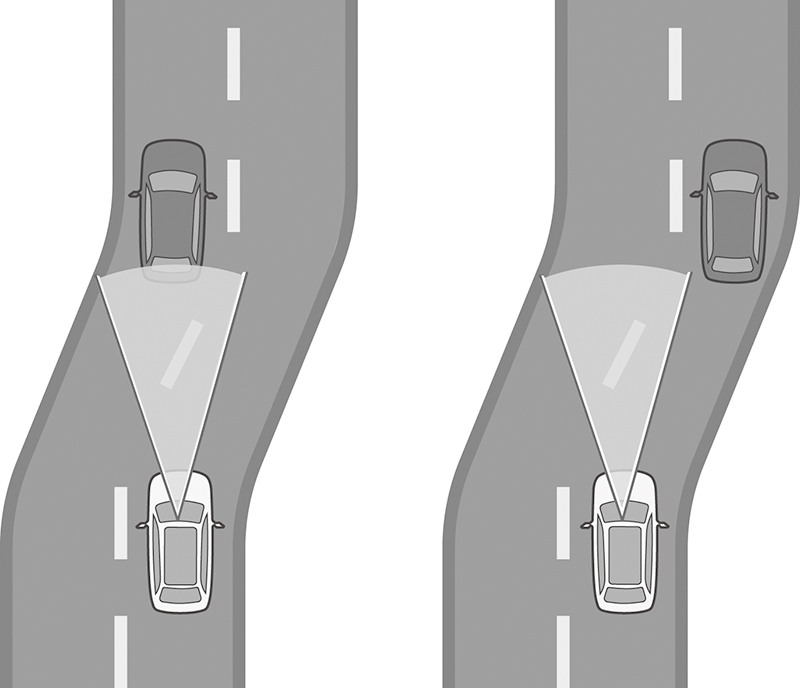
前方車輛的前進方向與本車輛正前位置有偏差的道路上。
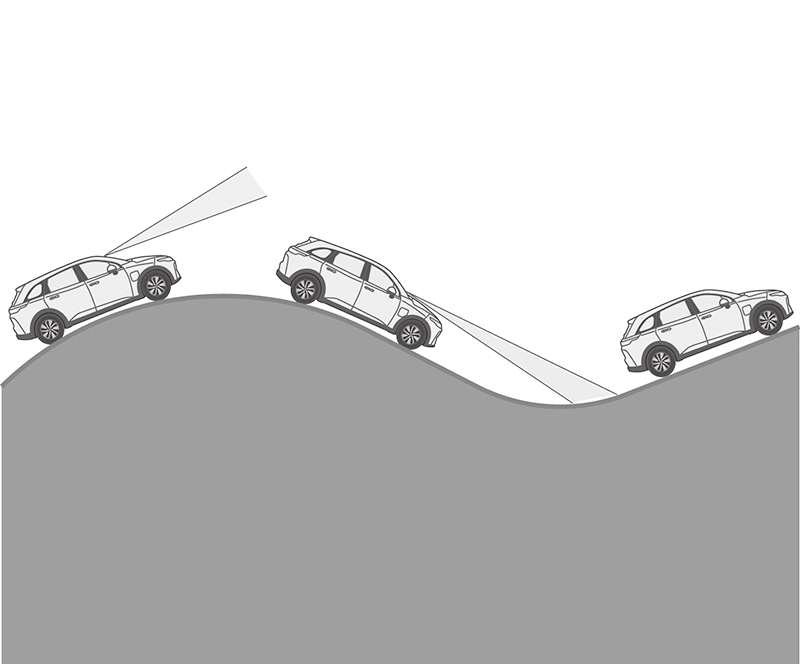
在山坡路段使用,導致鏡頭無法偵測前車車距
如前方有其他車輛離開車道,而該車道有其他車輛位於前方,ACC 不會針對靜止的車輛減速。
當前方跟隨車輛離開車道,自身車輛可能會加速 (回復到設定車速),此時須注意車速與周遭環境,並視需要進行煞車。
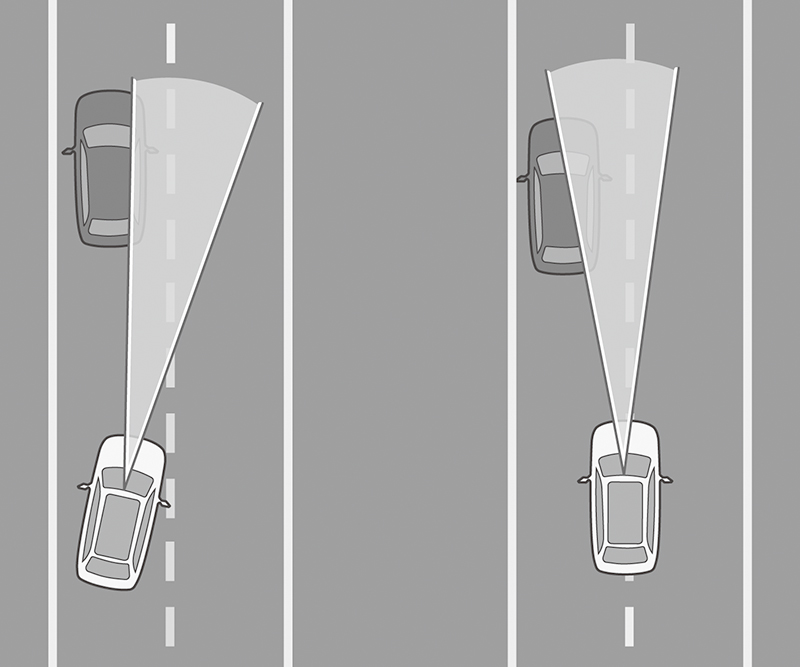
操作方向盤或車輛不在車道上穩定行駛。
窄小車輛或是車輛體積過小,可能導致攝影鏡頭無法辨識。
前方車輛突然減速或相鄰車道車輛突然駛入本車道,系統可能無法及時反應煞車及維持車距。

行駛在被結構物體圍繞的道路上 (如:隧道、橋梁、匝道、收費站) 時。
主動車距巡航系統可能因下列情況而無法發揮作用。此時請勿使用 ACC 系統,以免造成車輛碰撞或人員傷亡的情事發生。
- 交通壅塞的路段。
- 多彎道路段。
- 在交通繁忙的道路或在駕駛中連續走走停停的交通狀況時。
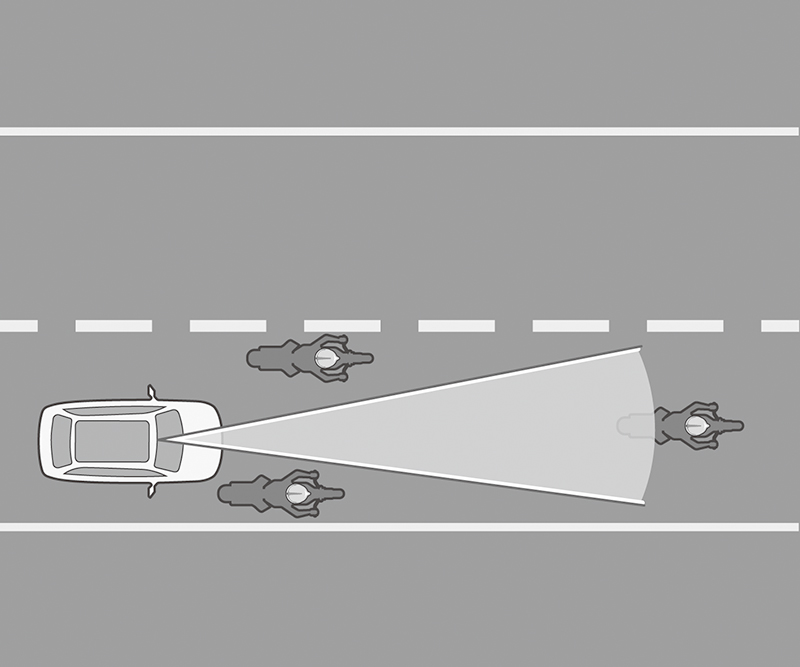
- 有行人、單車騎士的路段。
- 頻繁上 / 下坡的路段。
- 惡劣天候下駕駛 (強風、烈日、強光、下雨、起霧、下雪等)。
- 高速公路入口、出口匝道。
- 在有收費設施或交通動線之間有其他物體的道路,或在停車區,或有車輛通過的設施。
- 在陡峭下坡路段,因為滑行而超過設定車速的道路時。在此狀況下,ACC 將無法操作煞車以維持設定的速度,請駕駛依實際情況適度踩踏煞車及減速。
- 行駛於曲折、蜿蜒、坡度起伏過大或道路彎度過大的道路時 (包含:彎道出 / 入口,或道路施工與類似區域等封閉的車道旁行駛)。
- 上述項目並未完全列出干擾本系統正常運作的所有情況。
系統無法正常作用之情況
- 不規則、不平整、潮濕、髒污、泥土、水窪、積雪、樹葉、濕雪、大雨、濃霧或結冰等路段。
- 在惡劣天候下駕駛 (強風、烈日、強光、下雨、起霧、下雪、沙塵暴等)。
- 使用建議尺寸以外的輪胎、非建議的胎壓值或加掛雪鏈、四輪胎面磨耗不平均。
- 有雨、雪、污物黏附在車距監測的攝影鏡頭上時。
- 攝影鏡頭溫度過高。
- 車輛因負載過重或懸吊改裝而傾斜。
- 進出隧道瞬間 (光線亮度劇烈變化)時。
- 物體與背景的對比不明顯。
- 前方車輛底盤非常的低或是非常的高。
- 前方車輛為拖車或類似形狀的車輛。
- 前方車輛貨物突出車體。
- 前方車輛拖曳拖車、未拖曳貨櫃的曳引車、機車或自行車。
- 前方車輛髒污,被積雪、其他物體覆蓋。
- 前方車輛沒有反光裝備或反光裝備設置位置過低。
- 前方車輛具有大玻璃表面。
- 與前車車距過近 (鏡頭偵測範圍受限)。
- 前方車輛周圍光線不足時。
- 行經道路周圍結構複雜路段 (如:施工路段)。
- 上述項目並未完全列出干擾本系統正常運作的所有情況。
請僅能於道路及交通條件允許以穩定車速作長距離行駛時才使用定速巡航控制系統功能。
於下列情況下請勿使用定速巡航控制:
系統無法正常作用之情況
- 交通壅塞的路段。
- 多彎道路段。