巡航車距控制模式作用
巡航車距控制模式的設計是用來與前車保持所選定的車距並視情況能隨前車的減速行為執行跟車至靜止,但駕駛仍須依實際狀況踩踏煞車。
這個系統只能在交通狀況允許車輛保持一定的車速或者在車速的變化些微時使用。部分情況下,系統可能會無法立即介入致使與前車距離過近,請依實際狀況踩踏煞車,並與前方車輛保持適當的間距。
車距控制模式作用時會控制下列各項操作:
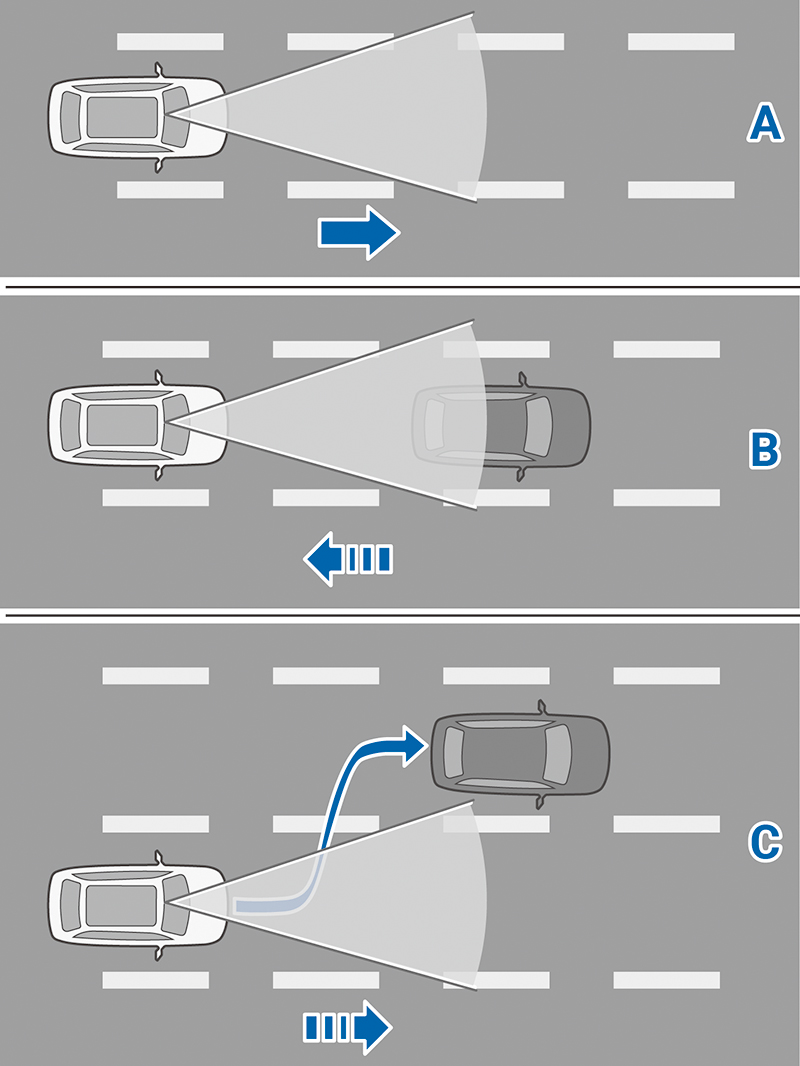
- 當前方沒有車輛行駛時,車距控制模式會在設定速度的範圍內 (30 到160 km/h 間) 保持由駕駛者所設定的速度。
- 當前方有車輛行駛時,車距控制模式會調整車速來與前車保持駕駛者所選定的距離。
- 當前方的車輛切離自身車道時,車距控制模式會自動調整車輛車速並保持在設定速度。
當您的車輛接近靜止或移動緩慢的車輛時,駕駛必須留意周遭交通狀況並適時操作來與前車保持適當的距離。
- 正常巡航行駛時:依設定巡航速度行駛。
- 與前車距離過近時:系統會自動減速至設定的車距。
- 前車駛離自身車道時:系統會自動調整至原先設定的車速。